My partner (Shriman Jha) and I are attempting to recreate the Boston Dynamics Sand Flea robot within our resource means. The Sand Flea is able to tilt itself backwards after deploying its legs, soundly launch itself on top of buildings due to an integrated piston, and continue to drive where it landed. Based on the only video of the robot in action, we have tried to deduce the technical specifications of the Sand Flea, and how we can achieve similar results. Currently, we have officially decided on all the mechanisms our robot will use, finalized the overall dimensions for our calculations, created a BOM, and roughly modeled our robot in SolidWorks (Images 1 & 2). We are working on this as a fun side project throughout the semester alongside our clubs, research, and coursework.

Image 1

Image 2
Our Design Explained:
Wheels: Our wheels are very similar to the Sand Flea ones as they need to be compressible to reduce the force of impact and wide enough to ensure the robot doesn’t land on it’s side. We plan on 3D printing the wheels with TPU.
Piston: We will use a carbon dioxide piston as compressed gas is less expensive and canisters are easy to replace.
Chassis: The chassis will likely be made of fiberglass as it is impact resistant. We will assemble the chassis with tab-slot joints so we can easily deconstruct it to replace the carbon dioxide canisters and access electrical components when necessary.
Legs: Contrary to what is depicted in our CAD, the robot’s legs must be deployed along the same axis as the back wheels as depicted in the Sand Flea video. This is because as the chassis begins to angle itself, the back wheels must stay put as support to keep the robot from falling backwards. Since the legs must be controlled on the same axis as the back wheels, they would both be controlled by the same motor. We implement this with a remote controlled gearbox inspired by a manual transmission (Image 3) that will shift motor control between the legs and the back wheels.
Stabilization Tail: Finally, our robot requires in-flight stabilization. The sand flea likely had an internal stabilization device, but we will use two external tails attached to the back of our robot on either side of the piston. We drew inspiration from the UC Berkeley researches who developed Tailbot (Video 1) which utilizes a simple mechanical tail for stabilization.
Video 1
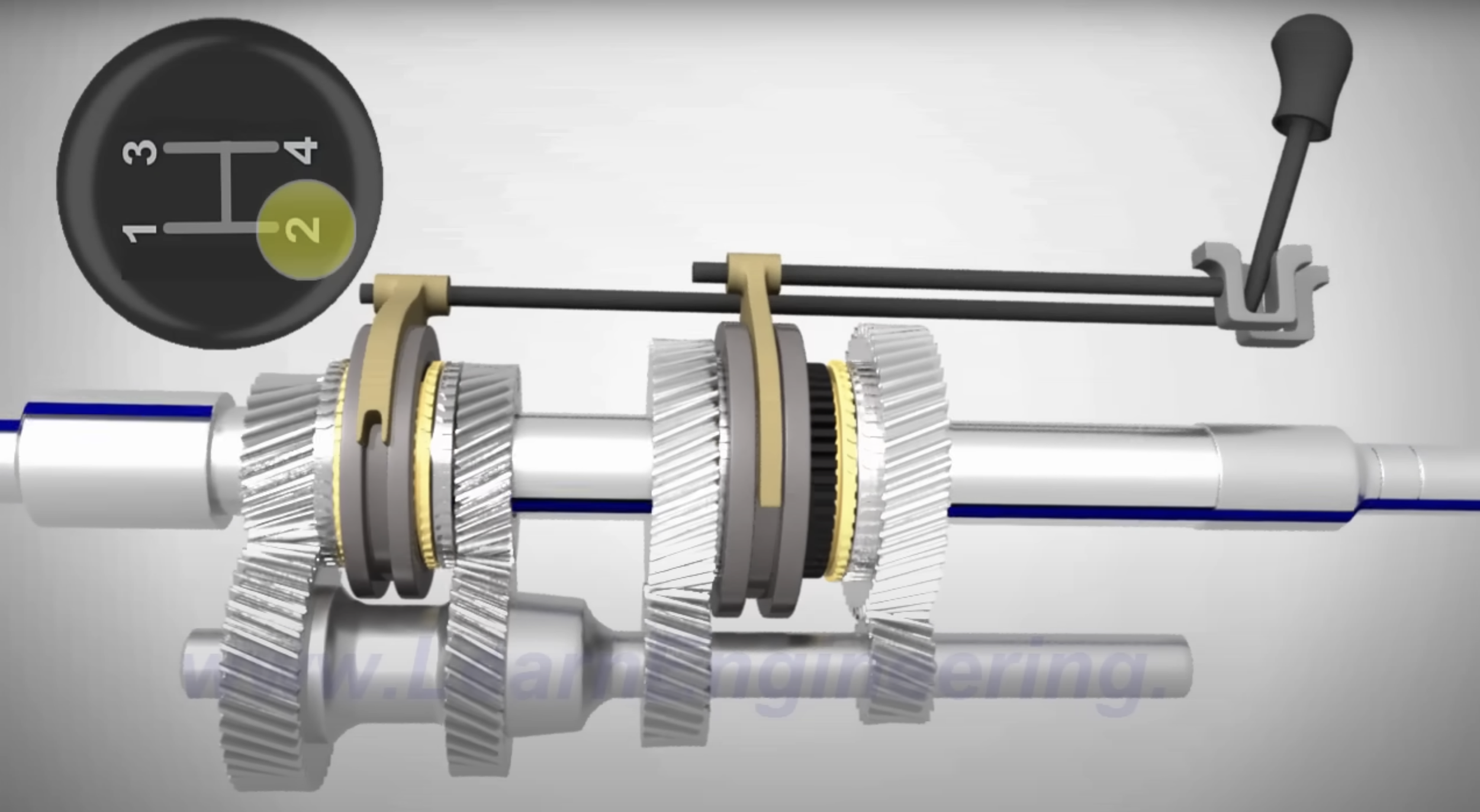
Image 3